












Russian Federation
Russian Federation
Saint-Petersburg, St. Petersburg, Russian Federation
UDC 69
UDC 69.05
UDC 658.5
Introduction. Automation of construction control is an important task for capital construction, the oil and gas industry, and mechanical engineering. The use of augmented (AR) and mixed (MR) reality technologies allows for the visual comparison of BIM models with actual objects on the construction site, but existing systems face limitations in terms of positioning accuracy (deviations of up to 71 mm, compared to the required 15 mm), loss of reference during movement, and the inability to accurately assess geometric inconsistencies on complex surfaces. Purpose of the work. Development and formalization of a loss function that contains information about the geometric features of an object, and positioning algorithms for construction control tasks using AR/MR technologies that take into account the internal geometry of the surface: geodesic distances, consistency of normals, local curvature, and spectral characteristics of the Laplace–Beltrami operator. Methods. A hybrid approach is proposed, combining voxel maps of the environment and a surface representation in the form of a triangular mesh. The final loss function for training the positioning system is a weighted sum of five components: Euclidean distance, geodesic component, normal component, curvature, and spectral component. The model is trained using gradient descent. Results. The analysis showed that the use of only Euclidean metrics does not allow to correctly estimate the deviations between the TIM model and the real object, especially for surfaces with complex geometry, high curvature and sharp boundaries. The proposed combination of geometric functionals provides a more informative signal for positioning algorithms, reducing the mean-square error of alignment, and also allows to preserve engineering-significant details that are smoothed or disappear in the traditional approach. Conclusions and prospects. Geometrically-informed methods eliminate a number of fundamental drawbacks of AR/MR construction control systems: loss of positioning during movement, insufficient accuracy on complex surfaces, and ignoring the internal geometry of objects. A promising area is the development of hybrid architectures and the integration of differential geometry methods into simultaneous localization and mapping algorithms.
construction control, augmented reality, BIM modeling, geodetic distances, Laplace–Beltrami operator, differential geometry, AR/MR, machine learning, capital construction
Содержание
Введение
За последние годы задачи автоматизации строительного контроля приобрели большую актуальность в промышленности, включая нефтегазовый сектор, энергетическое строительство и инфраструктурные проекты. Существенному ускорению процессов верификации, приёмки и мониторинга инженерных объектов могут послужить методы машинного обучения и технологии дополненной реальности [1]. Вопросы обеспечения качества строительного контроля рассматривались в работах ряда авторов. В частности, А.А. Лапидусом и Я.В. Шестериковой предложен комплексный показатель качества выполнения работ при возведении строительного объекта [2]. Позднее этот подход был развит в виде интегрированного индекса качества для всех этапов жизненного цикла объекта [3]. Однако эти показатели ориентированы в первую очередь на технологические и организационные аспекты строительства и не включают в себя количественные критерии геометрической точности, особенно для криволинейных поверхностей. В результате существующие методики оценки качества не учитывают в полной мере внутреннюю геометрическую структуру поверхности объектов, что особенно важно при использовании AR/MR-технологий для контроля монтажа оборудования со сложной геометрией. Одним из перспективных подходов к строительному контролю является использование AR/MR-технологий для визуального сопоставления BIM-модели с фактическим объектом на строительной площадке [4-6]. Такие системы удобны с точки зрения наглядности, позволяют оперативно выявлять коллизии и формировать отчёты, однако сталкиваются с фундаментальными ограничениями. Как показано в исследовании Пащенковой и др. [1], даже при наличии качественной BIM-модели точность позиционирования современных AR/MR-систем составляет 71 мм при требуемых 15 мм, а при появлении движущихся объектов или недостаточном количестве опорных точек происходит потеря привязки.
Известно, что точность совмещения цифровой модели с физическим объектом напрямую зависит от разрешения воксельной карты окружения, которая растёт кубически с увеличением точности (O(n³), где O — символ Ландау), что налагает жёсткие ограничения на вычислительные ресурсы мобильных устройств. Кроме того, воксельное представление неявно описывает поверхность объекта, что затрудняет точное воспроизведение гладких поверхностей, острых границ и инженерно значимых геометрических особенностей.
Дополнительной проблемой является то, что широко используемые алгоритмы позиционирования оценивают отклонения преимущественно в евклидовом пространстве, не учитывая внутреннюю геометрию поверхности. В результате система может демонстрировать приемлемые значения метрик, но при этом существенно искажать положение модели относительно реального объекта на участках с высокой кривизной.
В итоге при работе с AR/MR-системами строительного контроля приходится искать решение следующих проблем:
- Ограничение точности позиционирования (до 71 мм при норме 15 мм).
- Потеря привязки при движении оператора или появлении движущихся объектов.
- Отсутствие учёта внутренней геометрии поверхности (невозможность корректно оценивать отклонения на искривлённых участках).
В связи с этим возникает необходимость разработки методов, учитывающих геометрические свойства поверхности при обучении алгоритмов позиционирования. В данной работе предлагается подход, основанный на использовании инструментов дифференциальной геометрии для повышения точности AR/MR-контроля. В частности, рассматривается включение в функцию потерь геодезических расстояний, согласованности нормалей, а также характеристик, основанных на операторе Лапласа–Бельтрами, что позволяет учитывать как локальные, так и глобальные свойства формы.
Предлагаемый метод направлен на формирование более информативного сигнала для алгоритмов SLAM, обеспечивающего согласованность не только координат опорных точек, но и внутренней структуры поверхности. Это обеспечивает повышение точности позиционирования на сложных геометрических объектах, в том числе содержащих элементы с высокой кривизной.
Основной вклад работы заключается в формализации геометрически-информированной функции потерь для задач AR/MR-позиционирования, а также в разработке пайплайна, позволяющего применить методы дифференциальной геометрии в процесс обучения нейросетевых моделей для строительного контроля.
Задачи
- Анализ ограничений существующих AR/MR-систем строительного контроля.
- Разработка и формализация геометрически-информированной функции потерь с пятью компонентами.
- Разработка вычислительной процедуры для вычисления геодезических.
- Верификация подхода на тестовых моделях и формулировка границ применимости.
- Формулировка выводов и ограничений предложенного метода
- Анализ дальнейших перспектив искусственного интеллекта в рассматриваемой области
Материалы и методы
Рассматриваемая задача — автоматическое позиционирование BIM-модели относительно реального объекта на строительной площадке с использованием AR/MR-устройств.
На начальном этапе доступны входные данные, например, изображение с камеры устройства или данные с датчиков глубины, а также эталонная BIM-модель. Цель — построить функцию позиционирования, которая по входным данным определяет положение и ориентацию модели в пространстве. В традиционных подходах ошибка позиционирования оценивается в евклидовом пространстве. В данной работе требуется найти модель, которая минимизирует совокупную ошибку, включающую как евклидовы отклонения, так и различия в геометрических характеристиках поверхности
Функция потерь должна учитывать:
А) пространственное соответствие поверхностей (евклидово расстояние)
Б) согласованность нормалей (ориентация поверхности)
В) сохранение геодезических расстояний (внутренняя метрика)
Г) совпадение локальных и глобальных геометрических характеристик (кривизна, спектр)
Процесс обучения модели (пайплайн):
- Получение входных данных с AR/MR-устройства (изображение, карта глубины).
- Оценка текущей трансформации.
- Извлечение поверхности эталонной модели и трансформированной в виде треугольных сеток.
- Вычисление геометрических характеристик поверхностей (геодезические расстояния, нормали, кривизна, спектр).
- Формирование функции потерь как взвешенной суммы пяти компонентов.
- Обновление параметров модели методом градиентного спуска.
Представление поверхности
Как было сказано, для изображения поверхности используется треугольная сетка, содержащая множество вершин, ребер и граней. Формирование итоговой функции потерь будет происходить согласно всех требованиям, указанным выше в виде суммы отдельных функций потерь. Далее будет представлено описание каждого компонента в виде проблемы (1), вызванной его отсутствием в общей формуле, а также преимуществом (2) его включения в эту формулу.
А) Геодезическая составляющая
1. Евклидово расстояние измеряет длину прямого отрезка между двумя точками в пространстве. Однако на изогнутой поверхности, например, на цилиндрической трубе или на сферической крышке две точки могут быть близки евклидово, но очень далеки, если идти строго по поверхности.
2. Вводится понятие геодезического расстояния — это длина кратчайшего пути между точками, лежащего целиком на поверхности объекта. Геодезическая составляющая сравнивает геодезические расстояния между соответствующими парами точек на эталонной и предсказанной модели. Если внутренняя метрика (растяжения или сжатия поверхности) сохраняется, то геодезические расстояния будут совпадать, и функция потерь будет близка к нулю. Этот компонент особенно важен для длинномерных объектов (труб, балок) и искривлённых панелей. Выбор пар точек будет сделан с помощью случайной выборки для ускорения громоздких вычислений. Для вычисления геодезических на произвольной поверхности нет общей формулы, поэтому будут предложены два метода, каждый из которых будет находить оценку для расстояния между точками. Первый — heat method, который по сути решает уравнение теплопроводности, изучая, как тепло распространяется по поверхности объекта, затем восстанавливает градиент и вместе с ним кратчайший путь; второй — алгоритм Митчелла-Маунта-Пападимитриу (ММП), также находящий длины геодезических на дискретизированной поверхности (алгоритм разворачивает треугольную сетку и вычисляет расстояния на плоскости). Для непосредственного обучения нейросети будет использован первый метод, а на этапе валидации будет использован алгоритм ММП, который даст значения на эталонной модели.
Б) Согласованность нормалей
1. Две модели могут лежать в одном месте, но быть перевернутыми (например, плоская панель может быть перевёрнута лицевой стороной вниз). Евклидово расстояние этого не заметит, так как координаты точек могут совпадать.
2. Каждая точка на поверхности имеет нормаль — это вектор-перпендикуляр, указывающий наружу. Если одна и та же точка модели и реального объекта имеет примерно одинаковую нормаль, значит, поверхность ориентирована правильно. Нормальная составляющая функции потерь использует скалярное произведение нормалей. Если нормали противоположны, скалярное произведение близко к -1, вклад в ошибку максимален. Если нормали совпадают, даёт нулевой вклад. Этот компонент незаменим при контроле монтажа оборудования с жёсткими требованиями к ориентации (клапаны, фланцы, панели).
В) Кривизна поверхности
1. На сложных поверхностях (рёбра, фаски, места сварки, отверстия) евклидовы метрики «сглаживают» детали. Модель может быть гладкой там, где реальный объект имеет острый угол или резкий перегиб.
2. Вводится понятие средней кривизны — меры того, насколько поверхность изогнута в данной точке. У гладкой плоскости кривизна близка к нулю, у острых рёбер и изгибов она высока. Данный компонент сравнивает среднюю кривизну в соответствующих точках эталона и предсказанной модели. Если модель «сгладила» острый угол, кривизна в этой точке окажется заниженной, и функция потерь даст большой сигнал ошибки. Это помогает нейросети восстанавливать рёбра и мелкие элементы.
Г) Спектральные характеристики
1. Все предыдущие компоненты локальные или точечные. Если часть объекта временно закрыта (например, заслонена рабочим или строительной техникой), локальный контроль может потерять привязку. Нужен признак, который описывает форму целиком и устойчив к помехам.
2. Рассмотрим оператор Лапласа–Бельтрами — это специальный математический объект, который обобщает понятие второй производной на случай искривлённой поверхности. Если решить так называемую спектральную задачу, мы получим набор собственных чисел — это спектр поверхности [7-9]. Спектр похож на «отпечаток пальца» формы: у двух разных форм спектры почти всегда разные, а если поверхности одинаковы с точностью до изгибания (без растяжения), спектры совпадают. Кроме того, спектр устойчив к небольшим изменениям видимости — если закрыть 10–20% поверхности, спектр изменится незначительно. Спектральная составляющая сравнивает первые несколько собственных чисел спектра предсказанной модели и эталона. Если глобальная форма совпадает, функция потерь мала. Это помогает системе не «терять» объект при кратковременном затенении1 [10].
Функция потерь
Итоговая функция потерь будет представлять из себя взвешенную сумму отдельных функций, включая также и ту, что представляет из себя используемую традиционно сумму евклидовых расстояний между точками. На данном этапе становится очевидной идея о том, что воксельная модель может быть модернизирована с помощью гибридной, сочетающей в себе евклидову и геодезическую информации, модели.
Ограничения
1. Качество дискретизации и точность начального приближения
Как было сказано выше, для дискретизации поверхности объекта используется треугольная сетка, однако открытым остается вопрос о количестве вершин для оптимального приближения, поскольку эффективный подход потребует довольно большого количества вершин, а, следовательно, и времени на обработку. В связи с этим возникает необходимость составить случайную выборку вершин (по индексам, так как топология объекта не меняется при проектировании), которые будут использоваться для расчета ошибки предсказания
2. Чувствительность к шуму
Алгоритм Heat Method предполагает, что входная треугольная сетка является достаточно гладкой. Шум, характерный для мобильных AR-устройств (амплитуда шума до 5-10 мм на дистанции 2-3 метра), приводит к локальным искажениям сетки, которые могут быть ошибочно интерпретированы как значимые геометрические несоответствия. В результате геодезическая составляющая функции потерь может фокусироваться на шумовых, а не на реальных отклонениях.
3. Игнорирование нежёстких деформаций объекта
Предложенный подход предполагает, что объект является абсолютно жёстким. В реальных условиях возможны нежёсткие деформации: осадка конструкций, тепловое расширение и прочие изменения. Это приводит к тому, что даже при идеальном позиционировании геодезические расстояния на реальном объекте будут систематически отличаться от эталонных, что может быть ошибочно интерпретировано как ошибка нейросети.
Результаты
Необходимые обозначения:
- $X$ — входные данные.
- $S_{gt}\subset R^{3}$ — эталонная BIM-модель.
- $V=\left\{v_{1},v_{2},...,v_{N}\right\}\subset S_{gt}$ — множество вершин сетки
- $f_{\theta }$ — функция позиционирования, где $\theta$ — множество параметров.
- $T=f_{\theta}\left(X\right)$ — трансформация (поворот и перенос).
- $S_{p}=T\times S_{gt}=\left\{R\times v+t\mid v\in S_{gt}\right\}$ — трансформированная модель. $R\in SO\left(3\right)$ — матрица поворота, $t\in R^{3}$ — вектор переноса.
- $d_{g}\left(x_{i},x_{J}\right)$ — геодезическое расстояние.
- $<>$ — скалярное произведение.
- $n$ — нормаль.
- $H$ — средняя кривизна.
- $\lambda_{k}$ — собственные значения оператора.
При жесткой трансформации топология сетки остается неизменной, поэтому можно установить взаимно однозначное отображение $\varphi$ : $S_{gt}\rightarrow S_{pred}$ , такое что $\varphi\left(v_{i}\right)=R\cdot v_{i}+t$ для всех.
Формулировка задачи:
$\min_{\theta}L\left(S_{p};S_{gt}\right)$
Формулы:
- $L_{g}=\sum_{\left(i,j\right)\in P}\mid\mid d_{g}^{\left(p\right)}\left(x_{i},x_{j}\right)-d_{g}^{\left(gt\right)}\left(y_{i},y_{j}\right)\mid\mid$ , P — множество пар соответствующих точек.
- $L_{nom}=\sum_i^{ }\left(1-<n_{p}\left(x_{i}\right),n_{gt}\left(y_{i}\right)>\right)$.
- $L_{curv}=\sum_i^{ }\mid\mid H_{p}\left(x_{i}\right)-H_{gt}\left(y_{i}\right)\mid\mid$.
- $L_{spec}=\sum_k^{ }\mid\lambda_{k}^{\left(p\right)}-\lambda_{k}^{\left(gt\right)}\mid$.
- $L=\lambda_{1}L_{chamfer}+\lambda_{2}L_{g}+\lambda_{3}L_{norm}+\lambda_{4}L_{curv}+\lambda_{5}L_{spec}$.
Современное состояние строительного контроля характеризуется наличием BIM-моделей высокого качества, но отсутствием эффективных инструментов их оперативного сопоставления с объектом на площадке. Ручные методы (тахеометр, рулетка, визуальный контроль) требуют значительных временных затрат и подвержены человеческому фактору. Именно здесь методы искусственного интеллекта и технологий дополненной реальности демонстрируют наибольший потенциал [1, 4, 5].
Традиционные алгоритмы компьютерного зрения требуют тонкой настройки параметров под каждый тип объекта и плохо справляются с изменяющимися условиями освещения на строительной площадке. Современные свёрточные нейронные сети и трансформерные архитектуры способны выделять характерные точки на объекте даже при наличии помех, классифицировать типы конструктивных элементов, распознавать маркеры позиционирования.
Это создаёт основу для полностью автоматического пайплайна строительного контроля: от съёмки объекта камерой AR-устройства до формирования отчёта о геометрических несоответствиях. Однако узким местом остаётся точность позиционирования (71 мм против требуемых 15 мм). Именно здесь предлагаемый в данной работе геометрически-информированный подход может устранить разрыв, предоставив алгоритмам SLAM функцию потерь, учитывающую не только евклидовы расстояния, но и внутреннюю геометрию поверхности.
Кроме того, как показано в работе Пащенковой и др. [1], в AR/MR-системах возникает проблема потери позиционирования при наличии движущихся объектов (техника, люди) в зоне прямой видимости. Использование спектральной составляющей
В работах А.А. Лапидуса и соавторов [2, 3] предложена методология строительного контроля с использованием BIM-технологий, показавшая свою эффективность при возведении высотных зданий. В то же время, как отмечают сами авторы [2], точность контроля на сложных криволинейных поверхностях остаётся ограниченной. Предлагаемый в данной работе геометрически-информированный подход может служить естественным дополнением к существующим BIM-методикам, обеспечивая более точное позиционирование на участках с высокой кривизной.
Для демонстрации целесообразности использования геодезической составляющей вместо только лишь евклидовых расстояний проведем эксперимент: создадим цилиндрическую модель (трубу) и дадим оценку получившейся ошибке.
План:
- Создание эталонного цилиндра (с основанием единичного радиуса, высотой образующей, равной 5, и дискретизированной треугольной сеткой, содержащей около 5000 вершин)
- Сгенерировать искаженную модель путем добавления случайного шума
- Вычислить геодезические (от 30 случайных источников до 50 получателей с помощью heat method)
- Сравнить с аналитическим решением (на цилиндре геодезические становятся прямыми на плоскости при развертке)
- Получить RMSE и сравнить результат с евклидовой метрикой
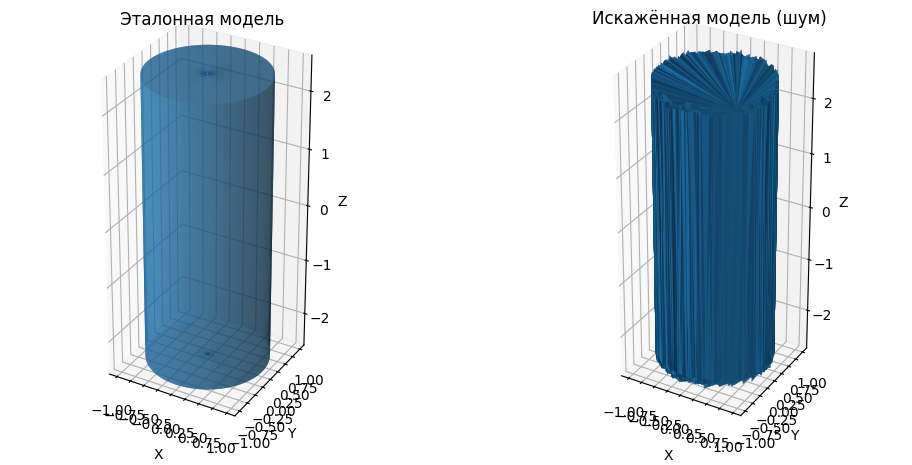
Рис. 1. Цилиндр, созданный с помощью trimesh,
и искаженная (зашумленная) модель
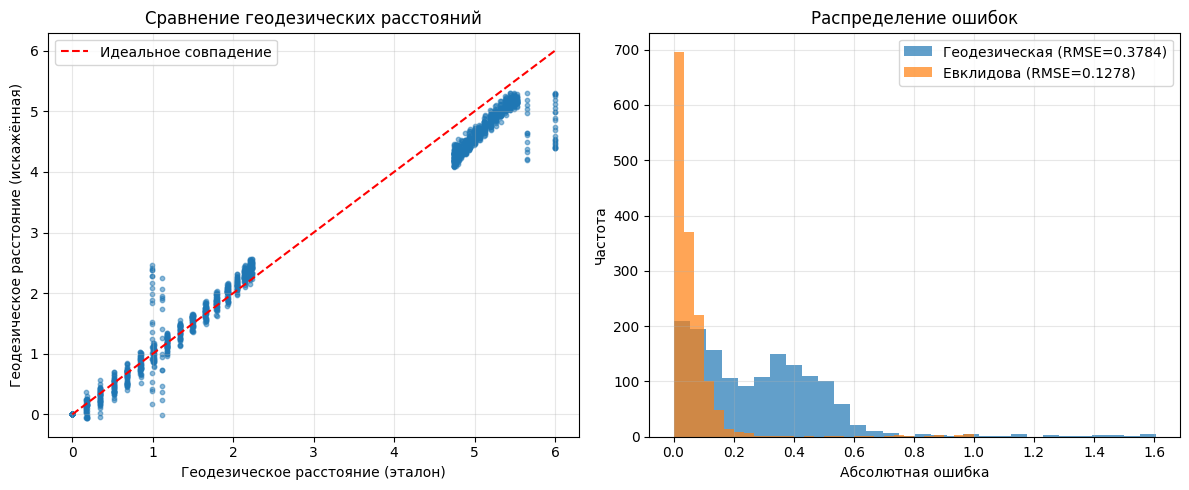
Рис. 2. Сравнение геодезической и евклидовой ошибок
на цилиндрической модели
В эксперименте с помощью trimesh был создан цилиндр (Рис. 1), который помимо радиуса основания и длины образующей включал также параметр sections, отвечающий за разбиение на определенное количество участков, а, следовательно, и количество точек. Приведем результаты перебора значений параметра в Таблице 1.
Таблица 1.
Результаты перебора значений параметра
|
sections |
Кол-во |
RMSE |
RMSE |
Отношение |
Точность heat method |
|
32 |
~ 2000 |
0,37 |
0,127 |
2,69 |
10,64 |
|
64 |
~ 5000 |
0,53 |
0,121 |
4,41 |
10,23 |
|
128 |
~ 10000 |
0,55 |
0,058 |
9,49 |
8,77 |
Вывод: результаты показывают, что геодезическая составляющая чувствительнее к искажениям формы, чем евклидова метрика (Рис. 2): отношение RMSE (Lg) к RMSE евклидовой метрики возрастает с 2.96 для грубой сетки до 9.49 для сетки из 10 000 вершин. Это подтверждает, что предложенный подход эффективно выявляет изменения внутренней метрики поверхности. Относительная ошибка Heat Method по сравнению с аналитическим решением на развёртке цилиндра составила 8.8% для сетки из 10 000 вершин, что меньше 10,64%, полученных при 2000 точек. Можно было бы предположить, что дальнейшее увеличение параметра sections вызывала лишь уменьшение ошибки, однако при переборе значений параметра вплоть до 1000 ошибка далее увеличивалась до 9%. Оптимальное значение параметра находится в диапазоне от 128 до 140. На иллюстрациях можно заметить, что евклидова ошибка более сосредоточена около 0, тогда как геодезическая более скошена вправо, однако это не должно вводить в заблуждение: в данном случае евклидова метрика «не замечает» искажений модели, а геодезическая составляющая наоборот является более чувствительной, что подтверждает показатель отношения (который растет с увеличением числа точек).
Работа функции потерь
Как было сказано ранее, функция потерь включает в себя пять компонентов, однако для непосредственной оценки текущих результатов будут использованы лишь два — евклидово расстояние и геодезическая составляющая так как именно они обеспечивают дифференцируемость для сквозного градиентного спуска, пусть и с помощью аппроксимации.
Для обеспечения дифференцируемости Lg использован метод GeoCD (Geodesic Chamfer Distance), предложенный Alonso et al2. В отличие от классического Heat Method, который не является дифференцируемым в стандартных фреймворках машинного обучения, GeoCD строит дифференцируемую аппроксимацию геодезической метрики через kNN-граф с последующим min-plus умножением для распространения расстояний. Ключевой элемент — замена операции взятия минимума на аппроксимацию, обеспечивающую гладкие градиенты2.
Были реализованы два варианта функции потерь:
- Базовый вариант (с использованием только GeoCD), содержащий только дифференцируемые компоненты Lchamfer и Lg и предназначенный для сквозного обучения
- Гибридный вариант, дополняющий дифференцируемые компоненты предвычисленными значениями Lnorm, Lcurv и Lspec (полученными для эталонной модели).
Вывод по реализации
Предложенные варианты реализации функции потерь решают различные задачи. Базовый вариант является полностью дифференцируемым и может быть непосредственно использован для сквозного обучения нейросетей позиционирования, где критична возможность обратного распространения ошибки. Гибридный вариант сохраняет все пять компонентов исходной функции потерь, однако нормальная, спектральная составляющие, а также кривизна не участвуют в градиентном спуске и служат лишь регуляризаторами на этапе валидации. Это ограничение связано с отсутствием в публичных библиотеках дифференцируемых реализаций соответствующих операторов (в частности, дискретного спектра оператора Лапласа–Бельтрами). Полная дифференцируемая реализация всех пяти компонентов является перспективным направлением дальнейших исследований и может быть выполнена, например, с использованием подходов на основе дифференцируемых решателей спектральной задачи [12]. В рамках данной задачи строительного контроля с целевой точностью 15 мм экспериментально подтверждено, что даже использование только двух первых слагаемых функции потерь обеспечивает чувствительность к искажениям внутренней метрики, недоступную при использовании одной евклидовой метрики.
В гипотетическом пайплайне параметры обновлялись бы по следующему принципу:
$\theta\leftarrow\theta-\eta\nabla_{\theta}L$.
Весовые коэффициенты $\lambda_{i}$ могут быть подобраны эмпирически (в данной работе все имеют одинаковые значения 0,2).
Несмотря на отсутствие на текущем этапе полноценной обучаемой нейросетевой модели, в рамках исследования получены результаты, подтверждающие перспективность выбранного направления. Во-первых, проведен анализ существующих функций потерь, применяемых в задачах пространственного позиционирования трехмерных объектов. Во-вторых, рассмотрены две альтернативные формулировки геометрически-информированной функции потерь, включающие геодезическую составляющую. В-третьих показано, что геодезическое расстояние является более чувствительной к изменениям характеристикой различия поверхностей по сравнению с только евклидовыми метриками (в случаях, когда требуется сохранение внутренней структуры объекта). Полученные результаты позволяют рассматривать геодезическую составляющую как обоснованный элемент будущей обучаемой модели.
Заключение и обсуждение
В работе был проведён анализ современных AR/MR-систем строительного контроля и выявлены их ключевые ограничения, связанные с недостаточной точностью позиционирования (71 мм при требуемых 15 мм), потерей привязки при движении и отсутствием явного учёта внутренней геометрии объектов. Показано, что использование исключительно евклидовых метрик не позволяет корректно оценивать отклонения между BIM-моделью и реальным объектом, особенно для поверхностей со сложной геометрией.
Предложенный подход основан на определении и использовании геометрических характеристик поверхности в процессе обучения алгоритмов позиционирования, включая геодезические расстояния, нормали, кривизну и спектральные свойства, определяемые оператором Лапласа–Бельтрами [7-9]. Такой подход позволяет учитывать как локальные, так и глобальные свойства формы, обеспечивая более точное и устойчивое совмещение цифровой модели с физическим объектом.
Анализ показал, что использование геометрически-информированных функций потерь способствует устранению ряда недостатков традиционных методов и повышению точности позиционирования, особенно в задачах, требующих высокой точности и контроля конструктивно важных элементов1 [10].
Искусственный интеллект уже сегодня демонстрирует впечатляющие результаты на этапах распознавания объектов и оценки их положения в пространстве. Однако точная AR/MR-верификация требует учёта внутренней геометрии объектов. Перспективным направлением дальнейших исследований является разработка гибридных моделей, объединяющих воксельные карты и поверхностные представления (для точной верификации), а также интеграция методов дифференциальной геометрии непосредственно в архитектуры нейросетей, выполняющих позиционирование в реальном времени.
Развитие этих моделей в узком направлении может способствовать достижению требуемой точности позиционирования 15 мм (с текущих 71 мм), зафиксированной в исследовании Пащенковой и др. [1], а в широком — открыть путь к полностью автоматическому строительному контролю с промышленной точностью, без участия человека.
____________________
1Bronstein M.M., Bruna J., LeCun Y., Szlam A., Vandergheynst P. Geometric Deep Learning: Grids, Groups, Graphs, Geodesics, and Gauges // arXiv:2104.13478, 2021.
2Alonso P., Li T., Li C. GeoCD: A Differential Local Approximation for Geodesic Chamfer Distance // arXiv:2506.23478. 2025.
1. Pashchenkova V.V., Murlenko V.A., Gureev S.N., Evstratov V.S. Practical application of augmented reality and information modelling technologies in capital construction processes. Vestnik MGSU. 2025. V. 20. I. 5. Pp. 777-784. (In Russ.) https://doi.org/10.22227/1997-0935.2025.5.777-784
2. Lapidus A.A., Shesterikova Ya.V. Investigation of the complex quality index of works performance in the construction of a building Modern Science and Innovations. 2017;3:128-132. (In Russ.)
3. Lapidus A., Topchiy D., Kuzmina T., Shesterikova Y., Bidov T. An Integrated Quality Index of High-Rise Residential Buildings for All Lifecycle Stages of a Construction Facility. Applied Sciences. 2023;13(3):2014. DOI:https://doi.org/10.3390/app13032014
4. Adamtsevich L.A., Kharisov I.Z., Kamaeva Yu.V. International experience in applying industry 4.0 technologies for construction progress monitoring. Construction Production. 2022;3:58-66. DOI:https://doi.org/10.54950/26585340_2022_3_58. (In Russ.)
5. Adamtsevich L.A., Sorokin I.V., Nastychuk A.I. Promising industry 4.0 technologies in the context of the construction industry digital transformation. Construction and Architecture. 2022;10(4):101-105. DOI:https://doi.org/10.29039/2308-0191-2022-10-4-101-105. (In Russ.)
6. Adamtsevich L.A., Kamaeva Yu.V. Use of VR, AR, MR technologies in construction at the stages of the life cycle of capital construction projects. In: Actual problems of the construction industry and education – 2022: collection of reports of the Third National Scientific Conference. 2023:800-804. (In Russ.)
7. Needham T. Visual Differential Geometry and Forms. Princeton University Press; 2021. DOI: https://doi.org/10.1515/9780691219899
8. do Carmo M.P. Differential Geometry of Curves and Surfaces. Prentice-Hall, 1976.
9. Meyer M., Desbrun M., Schröder P., Barr A.H. Discrete Differential-Geometry Operators for Triangulated 2-Manifolds. // Visualization and Mathematics III. Springer; 2003:35-57. DOI: https://doi.org/10.1007/978-3-662-05105-4_2
10. Litany O., Bronstein A.M., Bronstein M.M., Makadia A. Deformable Shape Completion with Graph Convolutional Autoencoders. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). 2018. DOI: https://doi.org/10.1109/CVPR.2018.00202
11. Zheleznov M. A lifecycle management system for capital construction facilities based on a digital cloud platform implementing information modeling methods and technologies. E3S Web of Conferences. 2021;281:04007. DOI:https://doi.org/10.1051/e3sconf/202128104007
12. Evtushenko S.I., Kuzenko M.D. Use of augmented reality technology at the stages of the life cycle of a capital construction facility. Vestnik MGSU [Monthly Journal on Construction and Architecture]. 2023;18(11):1813-1820. DOI:https://doi.org/10.22227/1997-0935.2023.11.1813-1820. (In Russ.)
